魔改造の夜プロジェクト特設サイト
魔改造の夜プロジェクト特設サイト
TOP
第一の夜「おトイレ ゆか 宙返り」
第一の夜「おトイレ ゆか 宙返り」
第一の夜「おトイレ ゆか 宙返り」ページ
P:air cylinder技術解説
開発の裏側
第二の夜「キックスケーター綱渡り」
第二の夜「キックスケーター綱渡り」
第二の夜「キックスケーター綱渡り」ページ
HEY☆コウノスケーター技術解説
開発の裏側
TOPICS
第二の夜「キックスケーター綱渡り」ページ
HEY☆コウノスケーター技術解説
開発の裏側
第二の夜
「キックスケーター綱渡り」
【開発の裏側】
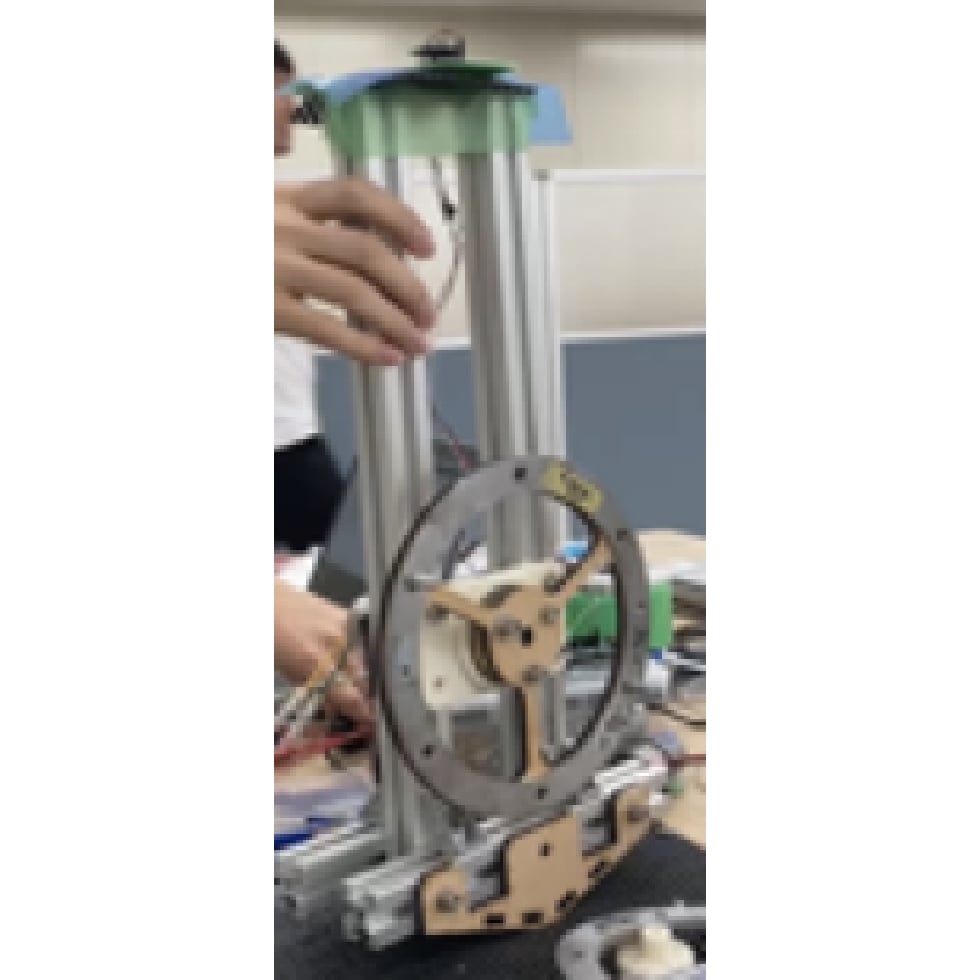
重心バランス確認治具
<方式概要>
金属ディスクの回転を制御することでバランスを保つ方式
6秒間自立した試作機
エンコーダーを搭載した試作機(最終成果)
<取り組み内容>
MATLAB Simulinkを用いた制御設計・最適レギュレータのシミュレーション
MATLAB Multibodyを用いたリアクションホイールの姿勢制御シミュレーション
→シミュレーションでは自立。理論アプローチは間違っていないことを確認。
IMUを用いた姿勢測定
モーターの検討
ステッピングモーター、パワーウィンドウモーター、DCモーター
エンコーダーによるリアクションホイールの回転速度取得
<得られた知見>
リアクションホイール方式には、幅広い加速・減速域を持ち、応答性が高いモーターが必須
<最終成果>
リアクションホイール原理試作機の製作
姿勢制御にPID制御を用いた試作機で6秒間の自立に成功
→モーター入手が遅れ、検証が間に合わず本体への実装は断念