

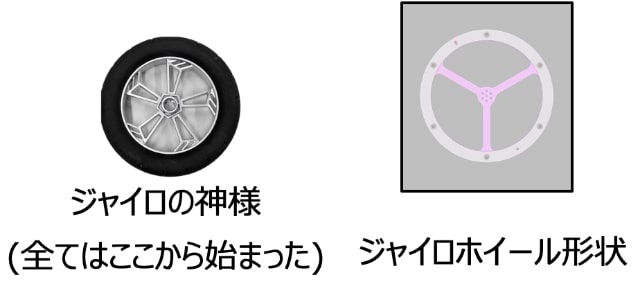
①ジャイロホイール
「ジャイロ効果によりマシンが安定的に自立」
- キックスケーターが縄の上に立つために必要
- 円盤を高速回転することにより、慣性力を生み出す
- 円盤を抜き某カーメーカーのエンブレムのような形状にすることで
円盤の外側に重量を持っていき重量当たりの慣性力向上させている
②オルダムカップリング
「ゴール時の衝撃からモーター軸を守る」
- 車輪にモーター動力を誰が組立てても効率よく伝えるための要素
- 車軸とモーター軸のズレを許容し、こじりを防ぐ
- ゴール時の衝撃によりスペーサーが外れることでモーター軸に負荷が掛からず、
モーターの損傷を防ぐ

③後輪駆動モーター
「最高速を出すための高回転型モーター」
- レース用にチューニングされた最高速維持用の540モーター。
ギアヘッド(減速比)は競技当日の縄の張力に合わせた試走環境で
下り坂と上り坂の影響を確認し、ギアヘッド同士を比較。
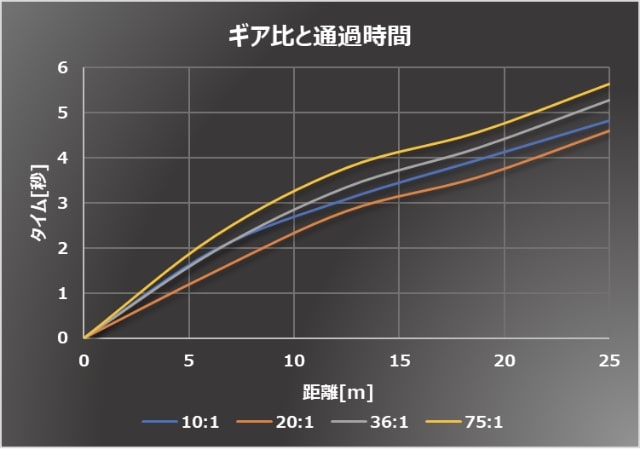 10:1が最高速は速いがトルクが不足するため
10:1が最高速は速いがトルクが不足するため初速が出ないことが分かり20:1を採用
④ワンウェイクラッチ(前後輪とも)
「回転数の違うタイヤ同士を両立させる」
- 回転数の違う車輪を両立させるために採用
- 一方向のみに回転力を伝達するクラッチ機構で回転数が遅い側の車輪は抵抗にならないように空回りするため効率よく動力を伝えられる
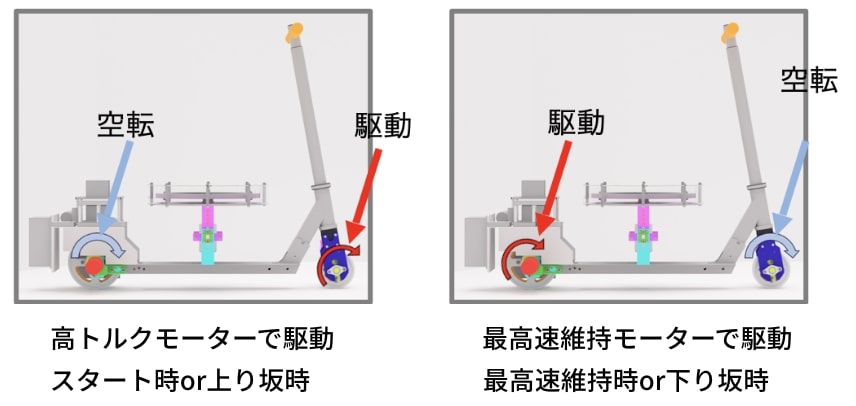
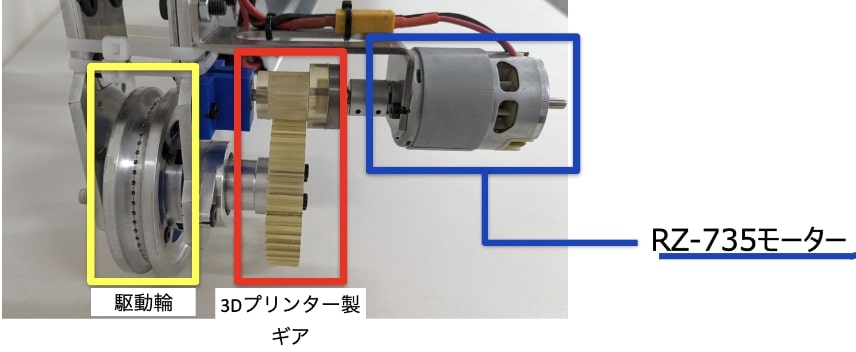
⑤前輪駆動モーター
「初速を出すための高トルク型モーター」
- 高トルクにより初速を出すRZ-735モーター
- ギアヘッドがなかったため、3Dプリンター製ギアを用いて、経験則から4:1の減速比で設計
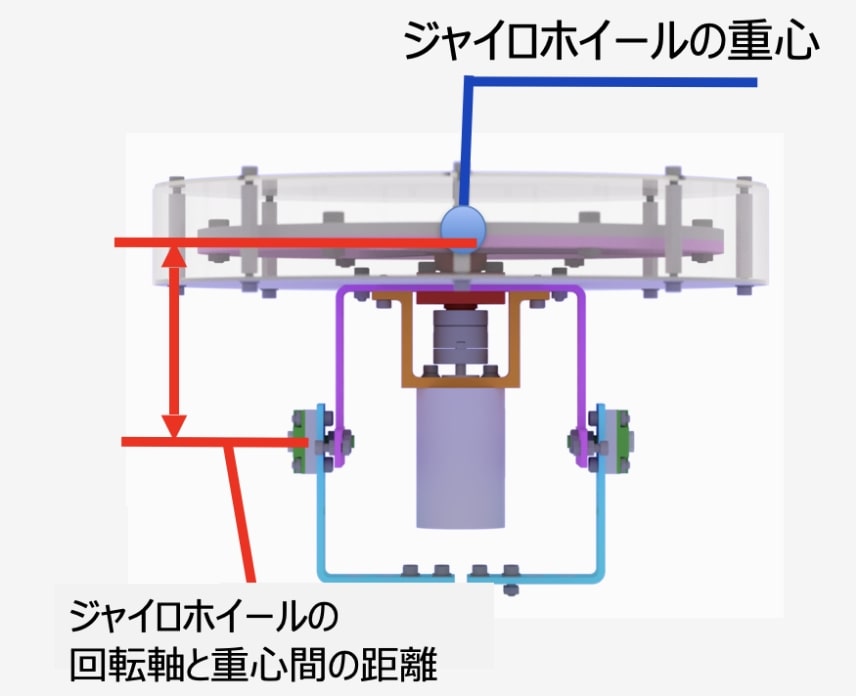
⑥スイング機構
「キックスケーターが縄の上に立つために必要」
- キックスケーターが倒れないために必要な角運動量と等価な角運動量はジャイロホイールの紙面方向前後の回転軸と重心間の距離に比例するため、スイングフレームは紙面方向前後の回転軸とジャイロホイール重心距離を離した構造で設計
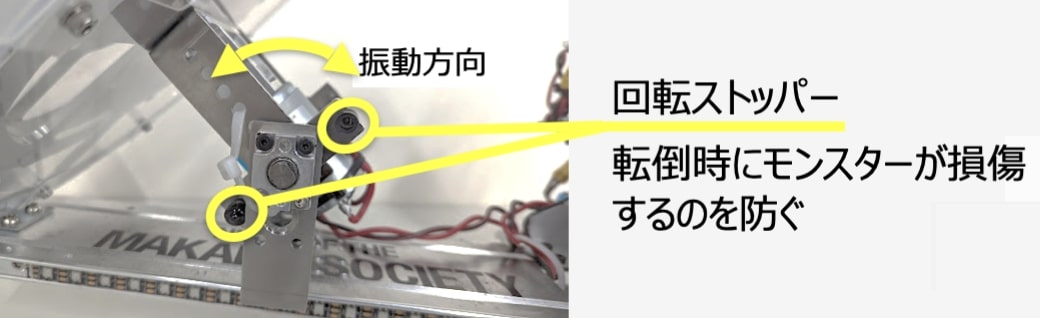
⑦安全カバー
「ジャイロホイールと接触してケガすることを防ぐ」
- 高速で回転する円盤(危険源)を作業者と物理的に切り離す最も重要な要素
※何より一番大事
これにより、調整時や万が一モンスターが落下し、暴走してもリスクが低減できる。 - 無色透明にすることでジャイロの機構が外から見えるようにし、何が起こっているか観察できるようにした。
 指の挟み込みの注意を促すシールも貼付
指の挟み込みの注意を促すシールも貼付
⑧お守り
「経営の神様が見守ってくれています」
- 安全に競技を終えれるように、走り切れるように願いを込めています。
- 尊敬の念も込め、経営の神様に見守っていただくことにしました。
- ちなみに、採用されなかった幻のロゴも好きです。

⑨制御回路
「高電圧・大電流に耐え安定して動作する独自設計回路」
回路
- 費用を抑えるためにギリギリの性能で設計
- コネクタは爪付きのXAを採用
- プログラムを変更せずにモータの出力を調整可能
- LEDバーでモードや傾きを表現

回路安全対策/ノイズ対策
- 安全対策としてヒューズを搭載(30Ax2)
- 電圧電流保護回路付きバッテリーを採用
- 高電圧(40V)高電流(60A)負荷に耐える安価なモータドライバを採用
- モータより発生するノイズ対策として、アルミパンチボード & ゴムシートの採用

⑩スタートスイッチ
「軽い力で安定して押せるスイッチ」
- 押しそびれ/故障リスクを下げるため、弱い力でも動作する2つのスイッチを機体後部に並列で設置

