
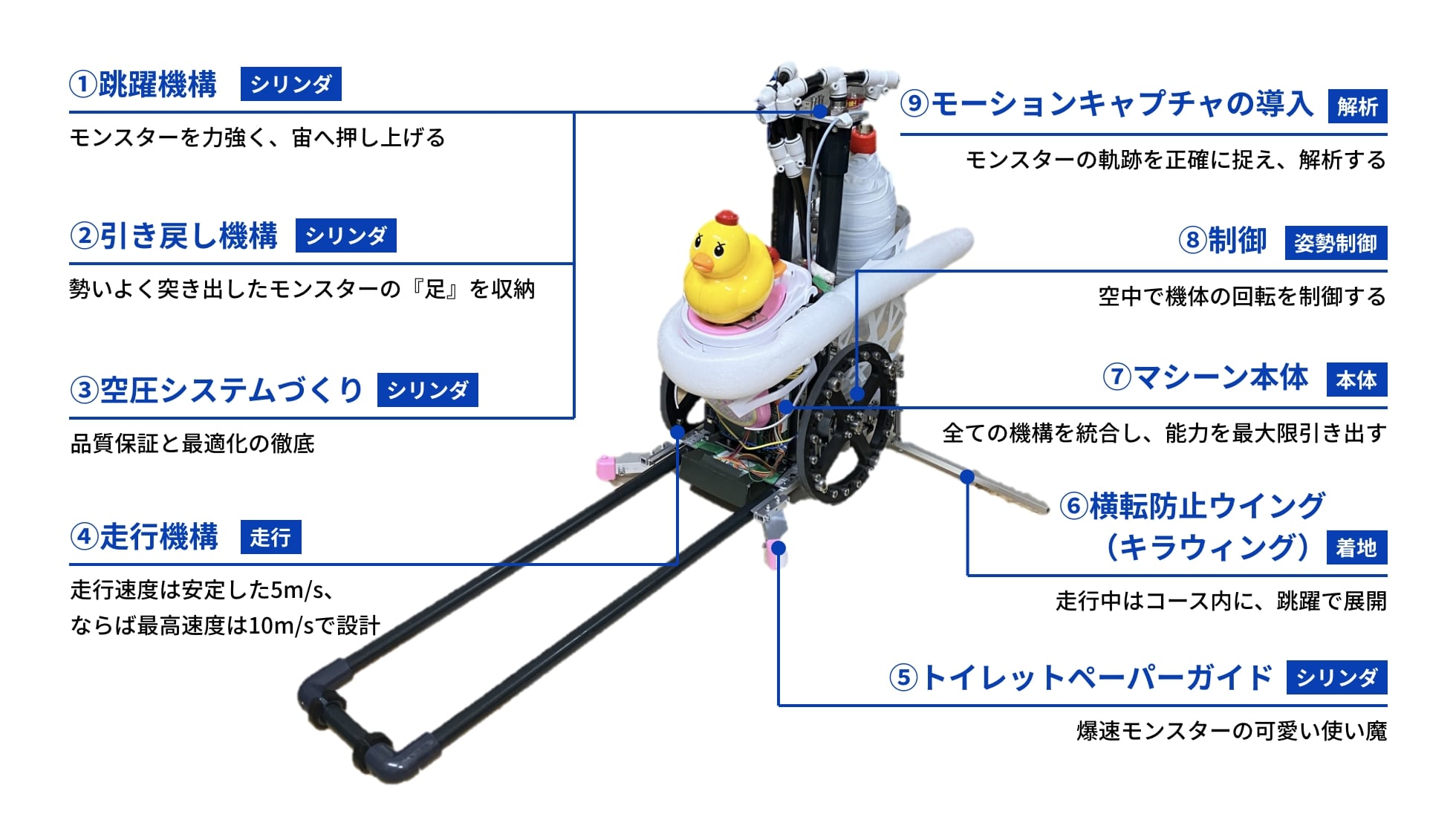
①跳躍機構
コースから的までの距離は5m。
跳躍機構には、5m跳躍する力を『一瞬で発揮する』仕組みが求められた。
複数の動力を検討した中で、市販のコンプレッサを使い効率よく力を溜めて解放できるという点から、圧縮空気圧(以下:空圧)を利用したエアシリンダ機構の採用が決まった。
一方で、跳躍機構はモンスターの中央に搭載されるため、他の機構と兼ね合いを考えると、
『軽さ&丈夫さ』、『カスタマイズし易さ』、『短期間での製作』などが求められる。
これらの要求を市販のシリンダで全て満たすことは難しく、自作シリンダの開発を決行した。
エアシリンダは筒と、その中で空圧を受けて動くピストンの二つから構成される。
自作シリンダでは、筒に軽さと耐衝撃性合わせ持った塩ビパイプを採用し、ピストンは試行錯誤を重ね摺動性の高いオリジナル部品を製作した。
ピストンや長さなど最適な組み合わせを求め、2~3日に一回のペースで計8バージョンの試作・改良を繰り返した。
おトイレゆか宙返りでは、本番仕様の自作シリンダを2本並べ、0.1秒(であってたっけ…)で300N超えの力を発揮する、まさにモンスターな「自作シリンダ」を開発した。

②引き戻し機構
自作シリンダ開発の中盤までは突き出しの勢いを優先し、シリンダの引き戻しを考慮しない「単動(突き出すときだけ空圧を使って力を発揮する)型」を前提に開発を進めていた。
しかし度重なるルール確認の結果、着地後にスタートと同じ姿勢に戻ることが求められ、突き出したシリンダ(モンスターの「足」)は引き戻さざるを得なかった。
「複同(突き出すときも引き戻すときも空圧を使う)型」のシリンダは、突き出し時の勢いを弱めてしまう構成のため、単動型シリンダを開発後にシリンダを引き戻す「引き戻し機構」も開発した。
突き出し動作に、引き戻し機構が出力低下の原因にならないよう、あらかじめ引き戻すためのばね力は溜めておき、突き出し動作が終わると共にロックを解除する機構を考案した。
具体的には、①引きばねをフックにかけた状で準備 ②突き出し動作を終えたシリンダが勢いでフックからばねを外し③外されたばねが戻る力でシリンダの引き戻しを実現する。
ユニークな機構ではあるが、この機構が宙返りする空中でうまく動作することで、モンスターの「足」が邪魔をすることなくゆかへ着地できるようになった。
③空圧システムづくり
エアシリンダを動作させるためには、空圧を生成するコンプレッサ、タンク、バルブ、シリンダの4点が必須である。
自作シリンダで跳躍力は発揮できるようになったが、その跳躍力を『確実に・正確に発揮する』仕組みづくりも重要であった。
タンクにためた空圧は、外環境や圧縮時の温度変化によって圧力が変化する。そこで、コンプレッサには精密なデジタル圧力計を取り付け、空圧の監視と温度が安定するまで待機する時間管理を徹底した。以上の取り組みにより、寸分違わない跳躍から着地が実現した。
タンクには軽量化のために炭酸ペットボトルを採用した。軽いほど跳躍力が発揮しやすいため、より小さく軽いタンクの搭載が望ましい。またバルブにおいても、小さく軽いバルブが望ましいのは同様である。一方で跳躍力を確保するためには一定以上のタンク・バルブの大きさが必要である。
これらの最適な構成の検討は、配管の長さやシリンダの摩擦など、シミュレーションでも考慮が難しい項目を含む課題のため、条件を変えて実験を繰り返し、製作期間内で最大限の改善を行った。

④走行機構
5m先の的に着陸させるに、走行速度5m/sを安定して出す必要あった。そこで、最高速度10m/sが出せるように540モータを選定。設計リソース低減とトルク確保のために左右独立駆動のツインモータドライブを採用。
Vmax = Rmax / N * D
( Vmax: 機体最高速度、Rmax:モータ最高回転数、N:ギヤ比、D:タイヤ径 )
L = (Vmax)^2 * M * D / 2T
( L:助走距離、M:機体質量、T:モータトルク )
⇒本番では、25%程度の出力で走行。本番時の寒冷状態でのバッテリー出力低下の影響を受けず目標速度で走破。
駆動回路には、実験のキックオフスピードを重視してラジコン用ESCを使用。ラジコン用プロポで「繋げば動く」を優先。
-

【走行実験の様子】
調子に乗ってスピード出し過ぎちゃった…
カメラマンに全速力で突っ込む機体
(カメラマンの吉良さんに怖い思いさせてごめんなさい。) -

【余談】
最初は手持ちの380モータで試作。個人的には違和感はないけど、こういうモータの使い方はだいぶ変な使い方らしい。
⑤トイレットペーパーガイド
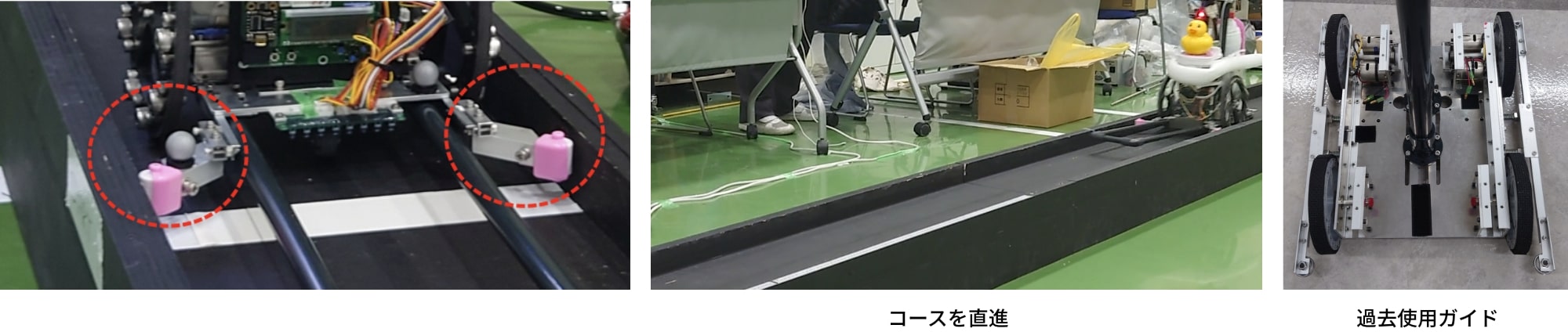
トイレットペーパーガイドは、2つの役割を持つ。
(1)10mのコースをモンスターが最高速度で直進できるように、壁からの摩擦を軽減する
(2)キュートでチャーミングで可愛くてごめん
モンスターが的の中心にきれいに着地するには、飛立つ前の速度と姿勢が重要であった。速度が遅いと的に乗らず、姿勢(進行方向左右、ヨー方向)がブレると着地時、的中心から左右にずれる。この両方の性能を満たすことが、トイレットペーパーガイドに求められた。
初期は前後左右に4つのローラーを配置し、ばねで壁に押し当て、コース中心軸を保つガイドを設計し使用していた。しかし、4点で壁に触れ、ばねで押さえつける構造は、面精度が担保されていない木材には摩擦が大きく、速度減衰に繋がった。
数回の走行実験の結果、機体前方の左右に固定したローラーを配置しても、安定してコースを直進できることを発見。そこで、壁との距離・高さを微調整できるようなガイドを設計。ふと、おトイレのトイレットペーパーが意外と滑らかに回転することに気づき、ガイドと合体。それが可愛いトイレットペーパーガイドへと変貌。
⑥横転防止ウイング(キラウィング)

横転防止ウイングは、翼を広げてアヒルちゃんが空へ飛立つためのカッコイイ機構、、
ではなく、モンスターが跳躍・着地後の横転を防ぐ役割を持つ。
ウイングは回転軸にばね付き蝶番を用いており、走行中は収納モードで壁にウイングが押され、コース内にウイングが収まる。モンスターが跳躍すると、壁に押されていたウイングのばねが解放されて、展開モードとなる。ウイングを広げると、モンスターの横幅は270mmから663mmへと2倍以上の幅となり、ロール方向の回転モーメントを着地台で抑え、横転を防止する。
また、衝撃がかかる部分でもあるため、部品数を増やすことで応力を分散させ、強度・耐久性の向上を計った。
⑦マシーン本体
シリンダ、前輪、後輪・ブレーキ、ガイド、基板・・・などなど
それぞれの開発者たちの思いが詰まった機構を乗せて1つにまとめる本体の設計
あらゆる可能性を考えて位置調整の自由度を優先した長穴とタップ穴だらけのアルミプレートを採用。
幾度となく着地の衝撃を受け変形しながらも本番までアヒルちゃんとトイレを支え続けてくれた。

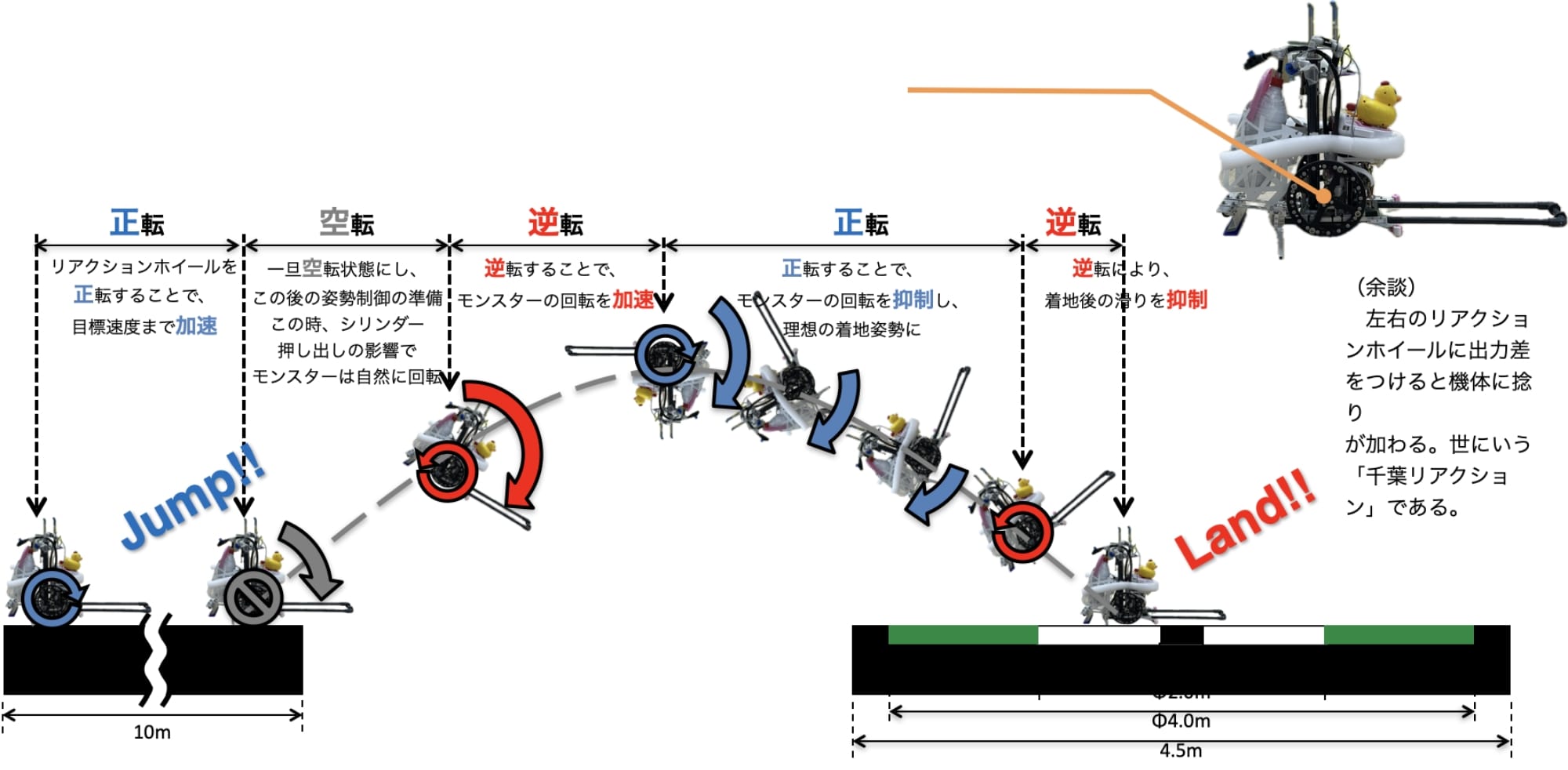
⑧制御
制御は、機体着地時点でぴったり1回転に制御する必要があり、リアクションホイールの回転制御が重要となる。
何度もジャンプを繰り返し、空転・逆転・正転をタイミングを絶妙に調整し、理想の着地姿勢に抑え込む。
⑨モーションキャプチャの導入
フィールド周りに設置した6台の赤外線カメラと、魔改造マシンに取り付けたマーカーを追跡するシステム。
おトイレ宙返りで満点を確実にするためには、魔改造マシンの安定した跳躍、すなわち再現性が必須です。このシステムで試技結果の跳躍距離、空中での回転量、を正確に評価することができます。
また、結果に影響する重要パラメータの走行速度、跳躍高さ、跳躍時の初速、空中での角加速度などを分析します。

【余談】
・終盤は魔改造マシンに搭載した加速度センサーを使った解析に切り替え、このシステムは役割を終えました。
・跳躍データに加えて、跳躍動画を観察することが重要でした。フィールドの様々な方向からスマホ6台以上で撮影していました。データで表現しきれない魔改造マシンの挙動を跳躍動画で観察し、不具合や改善点の気付きを得ることが多かったです。