




競技概要
魔改造されたトイレのおもちゃが宙返りして着地する、体操「ゆか」のような競技。
おトイレが跳び上がり「宙返り」「着地姿勢」「着地の位置」を合計30点で競う。
条件・ルール
- 助走路10m
- 踏切ラインから床の中心まで5m
- 「宙返り」「着地姿勢」「着地の位置」それぞれ満点が10点
- 合計30点満点の採点制
- 「宙返り」=縦方向に1回転以上回ったら10点、回れなければ0点
- 「着地姿勢」=立っていたら10点、立てなければ0点
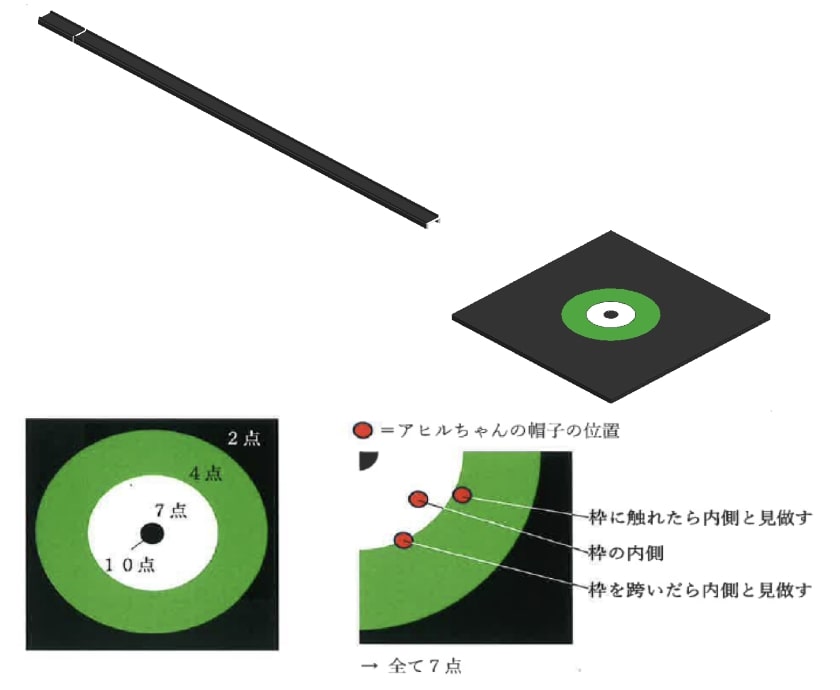
- 「着地の位置」=黒丸10点、白丸7点、緑丸4点、円から外れたら2点
- スタンバイは5分以内
※一部紹介
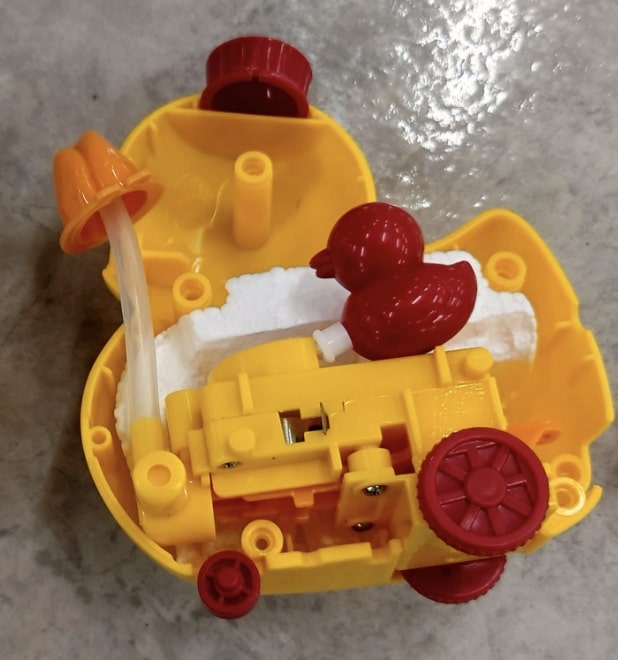
Pナソニック魔改造マシーン
P:air cylinder
(ペアーシリンダー)
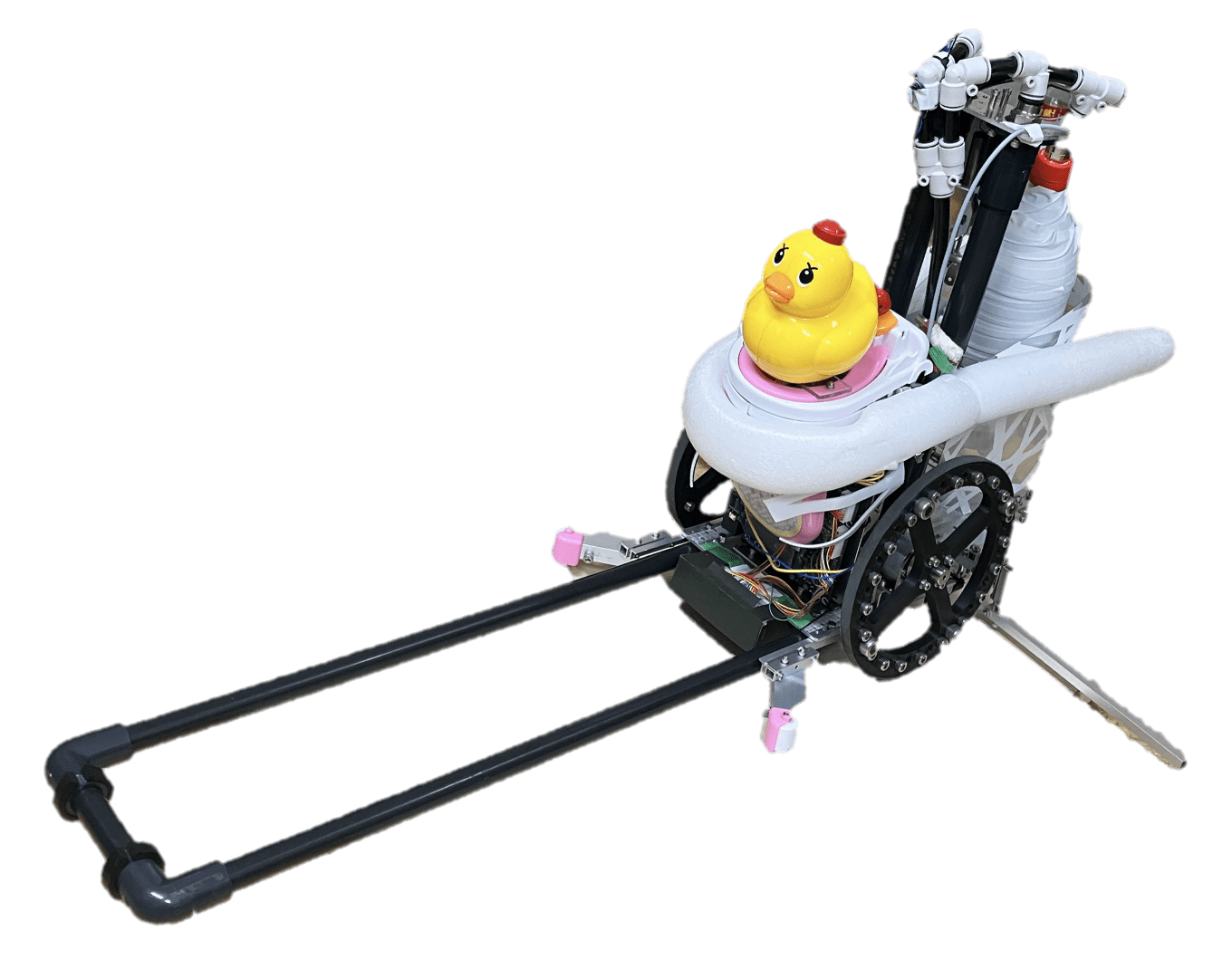
名前の由来
- Pナソニックの“P”
- 二連シリンダーのPair
チームメンバー紹介
-
 リーダー
リーダー宮島 勇也
「任せて任せず」を実践
バイアス破壊 自律分散組織 -
 サブリーダー(全体統括)
サブリーダー(全体統括)森山 俊樹
やって見せ(山本五十六さんの名言より)
メカ設計 チームマネジメント -
 サブリーダー(制御統括)・加工
サブリーダー(制御統括)・加工千葉 佳輝
完璧です!なんでもやります!(フラグ回収)
制御ハード チームマネジメント -
 跳躍機構の開発
跳躍機構の開発村上 将嗣
ロボコンを通して培った経験を基に、技術者してます。
メカ設計 ロボティクス -
 メイン基板設計・製作
メイン基板設計・製作巣之内 聡裕
基板作成はプロの所業
電子回路 プログラム -
 着地機構設計(実機には不採用)
着地機構設計(実機には不採用)北川 大
こんなにすごいメンバーが山ほどいたことに感動
メカ設計 -
 試技の解析/分析、皆のサポート
試技の解析/分析、皆のサポート上水 和平
私服で働く自由人
光学設計 チームビルディング -
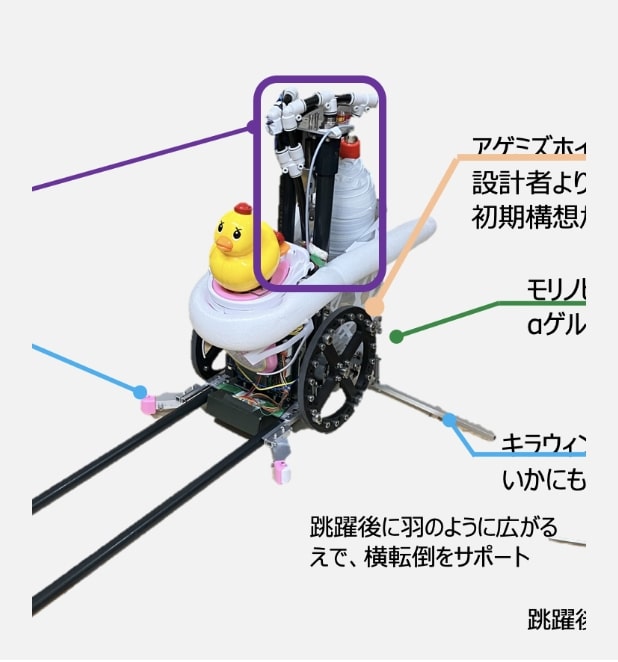
 ガイド、ウイング開発
ガイド、ウイング開発吉良 流星
ロボコン経験者、好きな素材はアルミ角パイプ、アクリル板、MDF、液晶。
メカ設計 計測検査 -
 制御系統
制御系統池田 拓磨
仕事と遊びは紙一重
解析・シミュレーション ソフトウェア -
 メカ機構の開発設計
メカ機構の開発設計小林 一三
隙間を埋めていく感じでみんなのサポートができればと思いながら取り組みました。
メカ設計 三次元測定 -
 メカ機構の統合
メカ機構の統合森野 弘大
やってみなくちゃわからない
メカ設計 ソフトロボディクス -
 試技の解析、簡単な部品加工などのサポート
試技の解析、簡単な部品加工などのサポート足立 悠仁
開発期間は初めて経験することばかりでとても充実してました。
光学設計 -
 低反発タイヤの開発(実機実験の結果、不採用)
低反発タイヤの開発(実機実験の結果、不採用)金田 侑
アヒル隊長の表情が好き
メカ設計 -
 跳躍機構の開発
跳躍機構の開発小原 英夫
純粋に夢中になれた。でも、勝ちたかった。
メカ屋 本部長
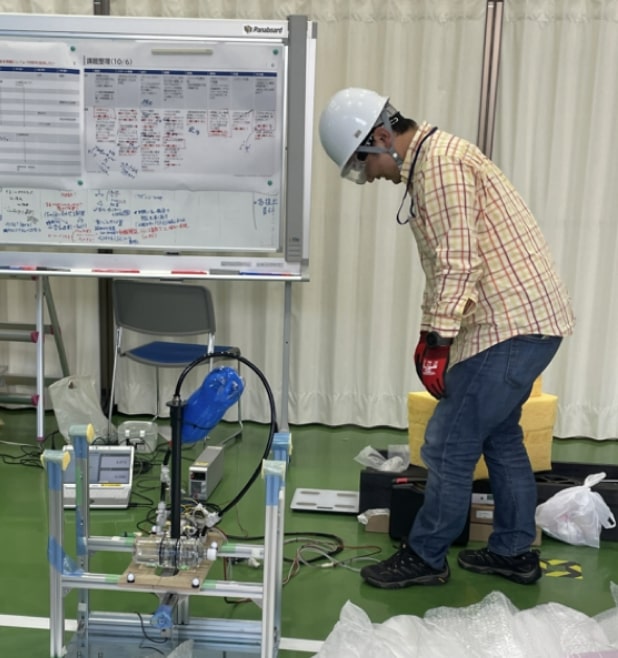
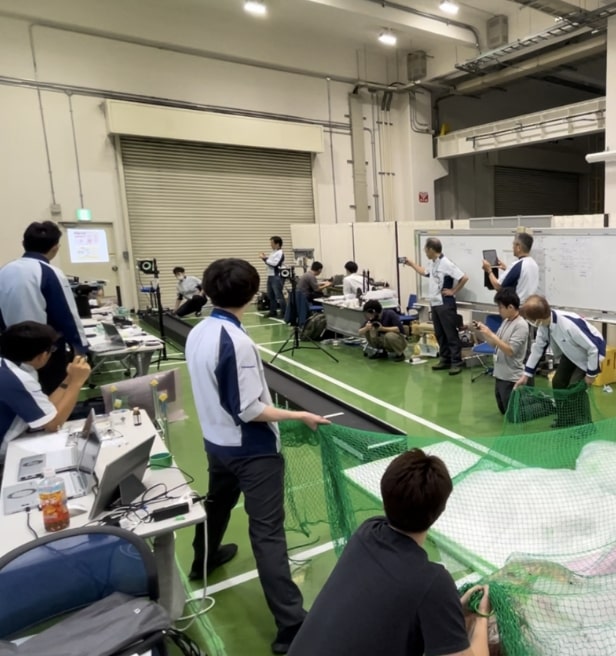
開発の裏側
プロジェクトチームの開発秘話や思い出などをご紹介します。
写真をクリックして詳細をご確認ください。