イスラエルのテルアビブで開催された世界最難関の国際会議European Conference on Computer Vision(*ECCV)2022(2022年10月24日から28日)にて、以下の以下の主著および共著論文が採択されました。
*ECCV:CVPR、ICCVと並ぶAI・コンピュータビジョン分野の権威あるトップカンファレンスです。世界中のAI研究者が最新の成果を発表・議論する場として知られ、採択率は20%-30%の狭き門となっています。
2022.10.24
論文・発表
AI基盤・CoE
AI・コンピュータビジョン分野の権威あるトップカンファレンスである*ECCV 2022に論文発表
論文リンク
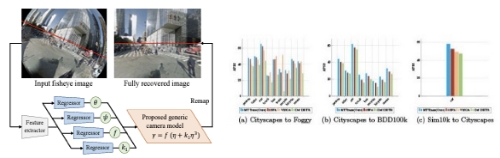
- “Rethinking Generic Camera Models for Deep Single Image Camera Calibration to Recover Rotation and Fisheye Distortion” Nobuhiko Wakai, Satoshi Sato, Yasunori Ishii and Takayoshi Yamashita
- https://arxiv.org/abs/2111.12927
- 深層学習を用いてカメラの歪みや傾きなどを、撮影した画像1枚から推定するカメラ校正法を考案しました。少ないパラメータで高精度に魚眼カメラをモデル化できるカメラの幾何モデルを提案することで、1枚のみの画像から、1つの深層学習モデルでも高精度にカメラ校正可能な設計を実現しました。加えて、これまで試行錯誤で調整する必要があった誤差関数のパラメータを、数値シミュレーションにより学習前に最適値を算出することで、精度向上と学習時間の短縮を可能にしました。本手法の有効性を大規模画像データセットと複数の実カメラで検証し、世界最高精度を実現したことが評価されました。 パナソニックHD 若井の主著論文で、中部大学 山下 隆義 教授との連携による研究成果となります。
- “MTTrans: Cross-Domain Object Detection with Mean-Teacher Transformer” Jinze Yu, Jiaming Liu, Xiaobao Wei, Haoyi Zhou, Yohei Nakata, Denis Gudovskiy, Tomoyuki Okuno, Jianxin Li, Kurt Keutzer and Shanghang Zhang
- https://arxiv.org/abs/2205.01643
- 本研究では、教師ラベルなしで異なる環境に適用することができる物体検出技術を提案しました。物体検出モデルの学習に教師ラベルの代わりに疑似ラベルを利用し、正確な疑似ラベルを得るため、環境変化による特徴表現の不一致を抑制する手法を複数階層にわたり導入しました。 環境変化に対するロバスト性を公開データセットを用いて評価し、当該の分野で世界最高性能を達成しました。バークレー大学AI研究所との連携の中で、パナソニックHD 中田、奥野が参画した共著論文となります。
関連リンク
- Project page[GitHub]
- https://github.com/panasonic-ai/rethinking-generic-camera-models