パナソニックホールディングス株式会社(以下、パナソニックHD)は、接触の多いタスクにおけるロボット制御の学習を効率化・高精度化するロボット制御向け拡散モデル“Diffusion Contact Model”を開発しました。
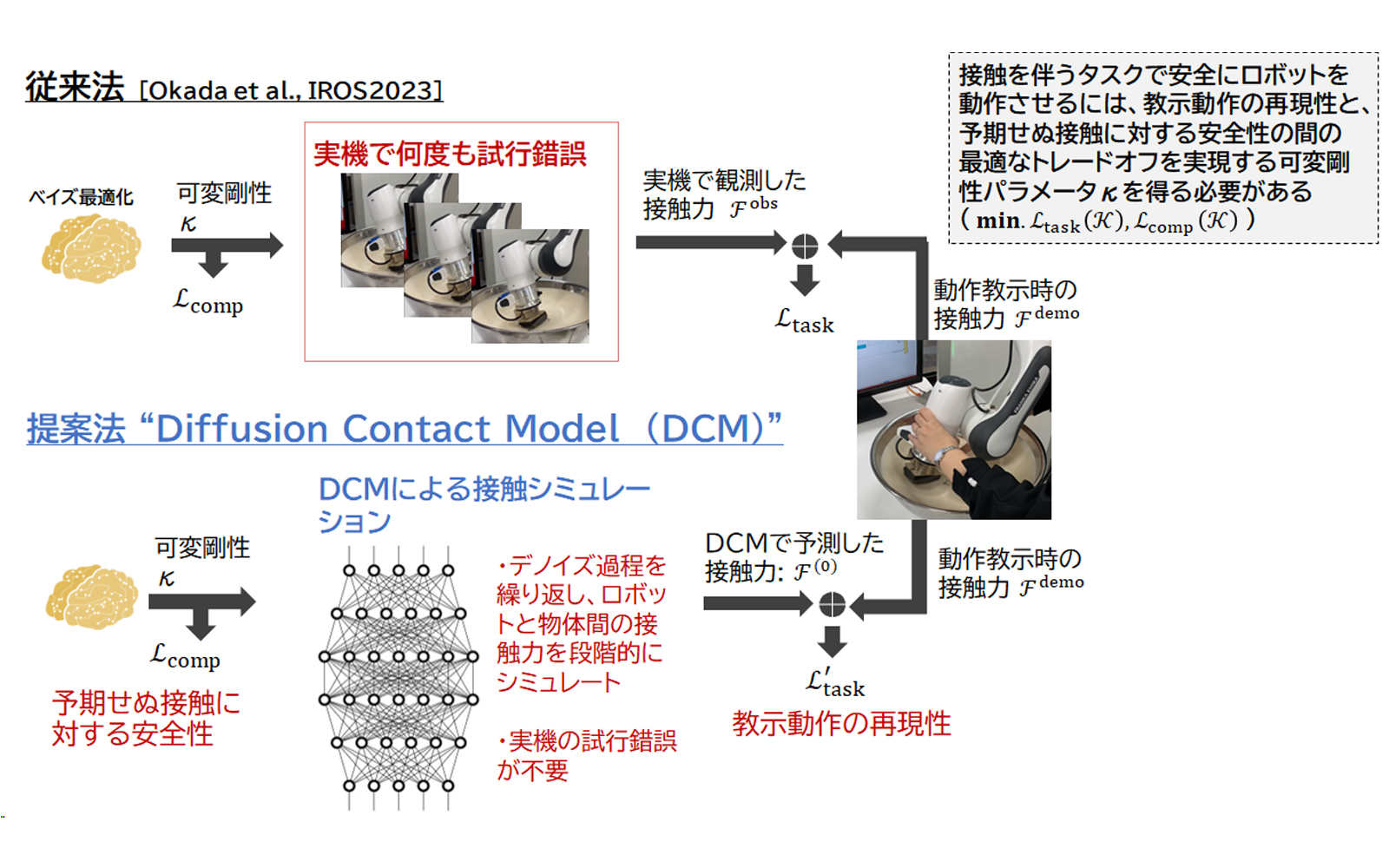
ロボットが人や物に触れた時の動きや力は、非常に複雑でシミュレーション環境でのモデル化が難しく、安全で正確な動作を実現するには、実機を用いて事前に何度も試行錯誤させる必要があります。そこで当社は、ロボット導入にかかるコストや時間を押し上げるこの課題に対処するため、昨今画像生成に用いられることの多い「拡散モデル(Diffusion Model)」を応用したロボット制御向けAI技術“Diffusion Contact Model”を開発しました。 本技術は先進性が国際的に認められ、AI・ロボティクス技術のトップカンファレンスであるIEEE/RSJ International Conference on Intelligent Robots and Systems(IROS)2024に採択されました。
論文リンク
- A Contact Model based on Denoising Diffusion to Learn Variable Impedance Control for Contact-rich Manipulation
Masashi Okada, Mayumi Komatsu and Tadahiro Taniguchi -
https://arxiv.org/abs/2403.13221